Hallo,
bei einem "normalen" Echolot visualisiert mir das Echolot ein Signal über der Laufzeit (Wassertiefe) und der eingehenden Signalstärke. Wenn ich mir jetzt die Daten von der SD- Karte für das erstellen von Karten nutzen möchte kann somit das erste eingehende Echo als Gewässertiefe genutzt werden. Das ist jetzt etwas vereinfacht aber so ungefähr wirds wohl gehen.
So jetzt die Frage: Was sehe ich den eigentlich bei einer Sideimaging Darstellung? Die Signallauflänge über den jeweiligen Empfangswinkel? Und wieso nutzt eine Mapping Software diese Daten nicht?
Die Herren Luke,Matt, Hubert, Paulchen, Fjordfischer und Wolfgang haben sich wohl mit dem Thema bereits beschäftigt und jetzt hoffe ich das Ihr mich nicht dumm sterben lasst  .
.
Gruß Schakka
Nein, lassen wir dich nicht,
fjordfischer hat ja schon mit dem Zitat von Wolfgang geantwortet.
Ich war zuerst auch deiner Meinung,
da müsste es doch eine Möglichkeit geben.

Deine und meine Überlegung war wohl ungefähr die gleiche,
habe da auch extra etwas dazu skizziert.
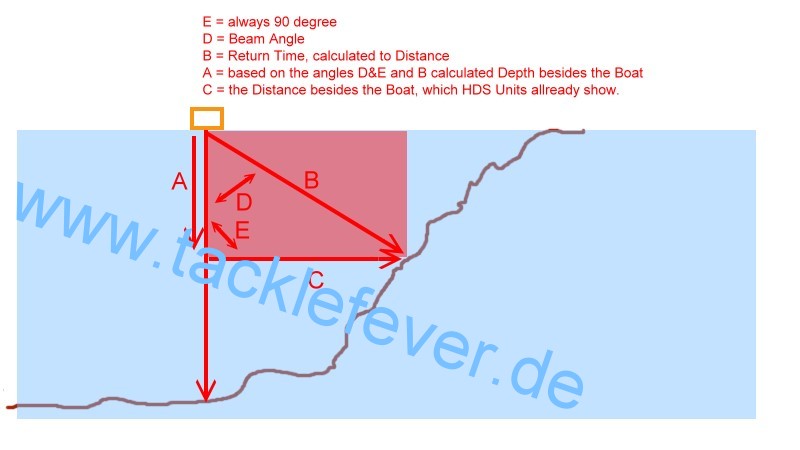
Aber mit allen Überlegungen hin und her blieb am Ende fast nur das über was zitiert wurde.
Da die HDS Geräte keine Fächer Echolote sind,
es somit nur das eine globale Signal je Seite gibt,
fehlen eben die konkreten Informationen,
wie den von dir angesprochenen Winkel, denn es gibt nur den einen.
Und nicht mehrere von mehreren Strahlen die aus gehen würden.
Und insofern gibt es tatsächlich nur einen Fächer (mit einem Winkel) der so wie das rosa unterlegte Feld berechenbar ist.
Es müsste aber viele solcher Flächen geben um mehrere Punkte am Grund berechnen zu können.
Die zurück kommenden Echos selbst reichen leider nicht als Strahl/Dreieck Schenkel, mit dem man dann rechnen könnte,
denn sie haben keine Winkelangabe.
Daher kann man anscheinend nur versuchen die Tiefe aus dem bekommenen Bild heraus zu rechnen und heraus zu analysieren.
So ähnlich machen das vermutlich einige Viewer näherungsweise.
Aber das ist für eine Karte wohl zu ungenau.




